 |
Robotics Library
0.6.2
|
|
Robotics Library
0.6.2
|
#include <queue>#include <boost/graph/adjacency_list.hpp>#include <boost/pending/disjoint_sets.hpp>#include <CGAL/Search_traits.h>#include "Orthogonal_k_neighbor_search.h"#include "Planner.h"#include "VectorPtr.h"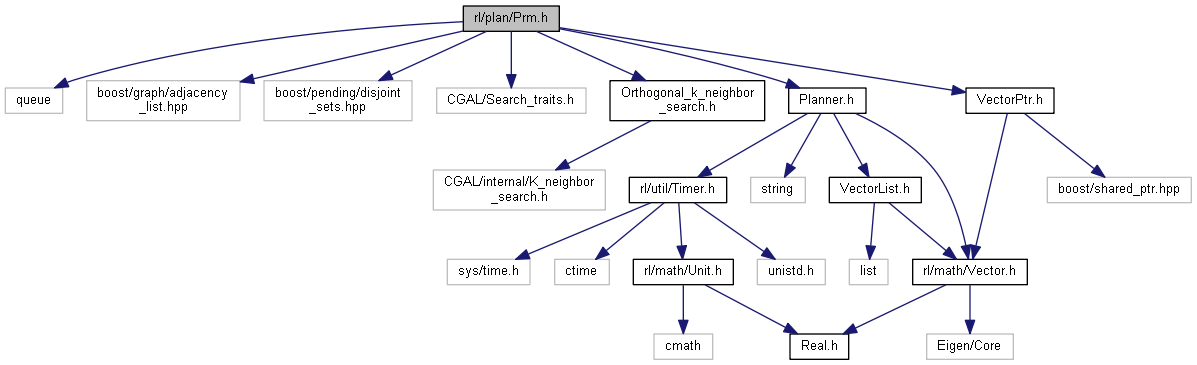
Go to the source code of this file.
Classes | |
| class | rl::plan::Prm |
| Probabilistic Roadmap. More... | |
| struct | rl::plan::Prm::EdgeBundle |
| struct | rl::plan::Prm::VertexBundle |
| struct | rl::plan::Prm::CartesianIterator |
| struct | rl::plan::Prm::Distance |
| struct | rl::plan::Prm::GraphBundle |
| struct | rl::plan::Prm::Compare |
Namespaces | |
| rl | |
| rl::plan | |