 |
Robotics Library
0.6.2
|
|
Robotics Library
0.6.2
|
#include <cassert>#include <iostream>#include <rl/math/Unit.h>#include "ComException.h"#include "endian.h"#include "DeviceException.h"#include "LeuzeRs4.h"#include "Serial.h"#include "TimeoutException.h"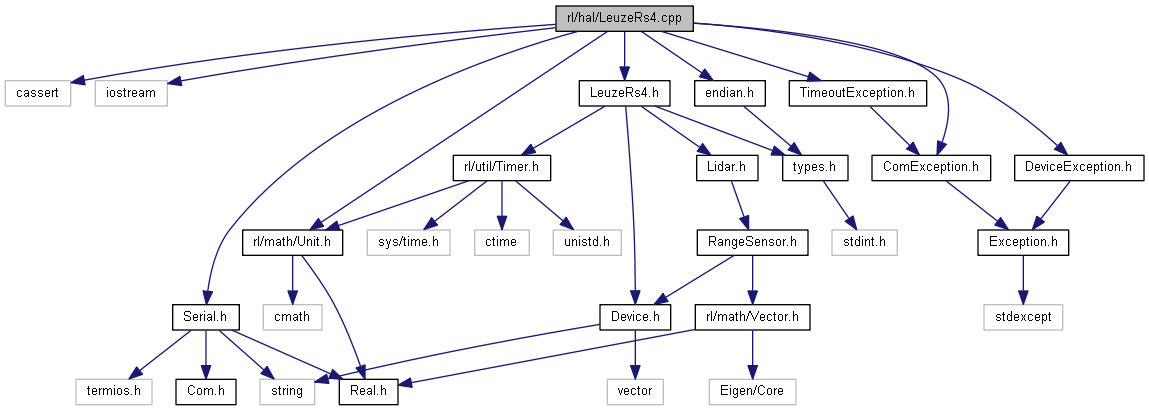
Namespaces | |
| rl | |
| rl::hal | |
Functions | |
| const uint8_t & | rl::hal::get (const uint8_t *&ptr) |
| void | rl::hal::set (const uint8_t &value, uint8_t *&ptr, ::std::size_t &len) |