 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
#include "Body.h"#include "Compound.h"#include "Exception.h"#include "Joint.h"#include "Model.h"#include "World.h"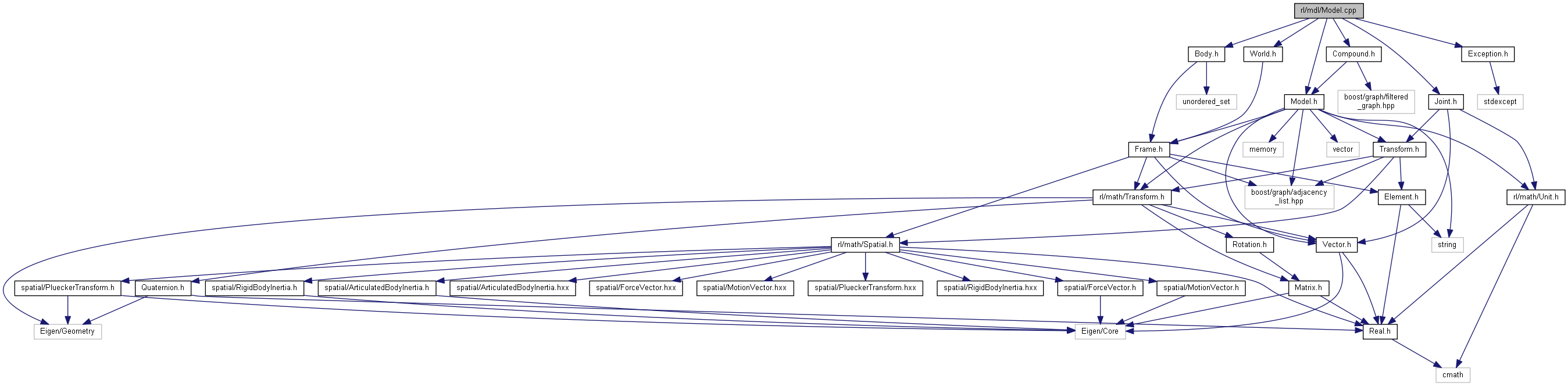
Namespaces | |
| rl | |
| Robotics Library. | |
| rl::mdl | |
| Rigid body kinematics and dynamics. | |