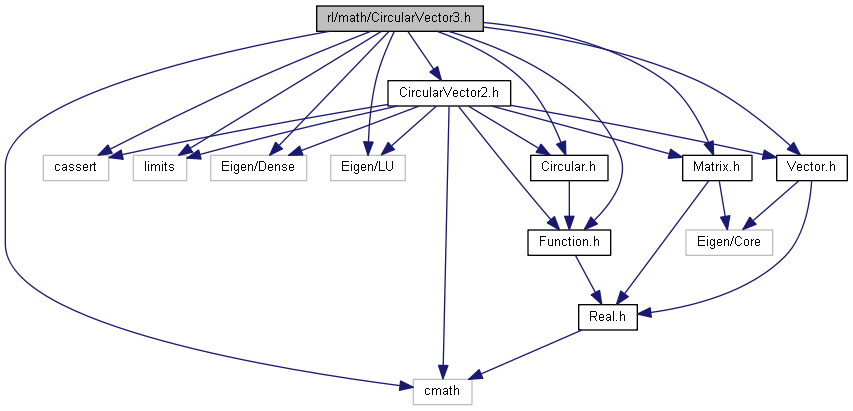
#include <cassert>
#include <cmath>
#include <limits>
#include <Eigen/Dense>
#include <Eigen/LU>
#include "Circular.h"
#include "CircularVector2.h"
#include "Function.h"
#include "Matrix.h"
#include "Vector.h"
Go to the source code of this file.
|
| | rl |
| | Robotics Library.
|
| |
| | rl::math |
| | Common mathematical functions.
|
| |
◆ EIGEN_MATRIXBASE_PLUGIN
| #define EIGEN_MATRIXBASE_PLUGIN <rl/math/MatrixBaseAddons.h> |
◆ EIGEN_QUATERNIONBASE_PLUGIN
| #define EIGEN_QUATERNIONBASE_PLUGIN <rl/math/QuaternionBaseAddons.h> |
◆ EIGEN_TRANSFORM_PLUGIN
| #define EIGEN_TRANSFORM_PLUGIN <rl/math/TransformAddons.h> |