 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
#include <cassert>#include <rl/math/Rotation.h>#include "Frame.h"#include "Joint.h"#include "Rhino.h"#include "Transform.h"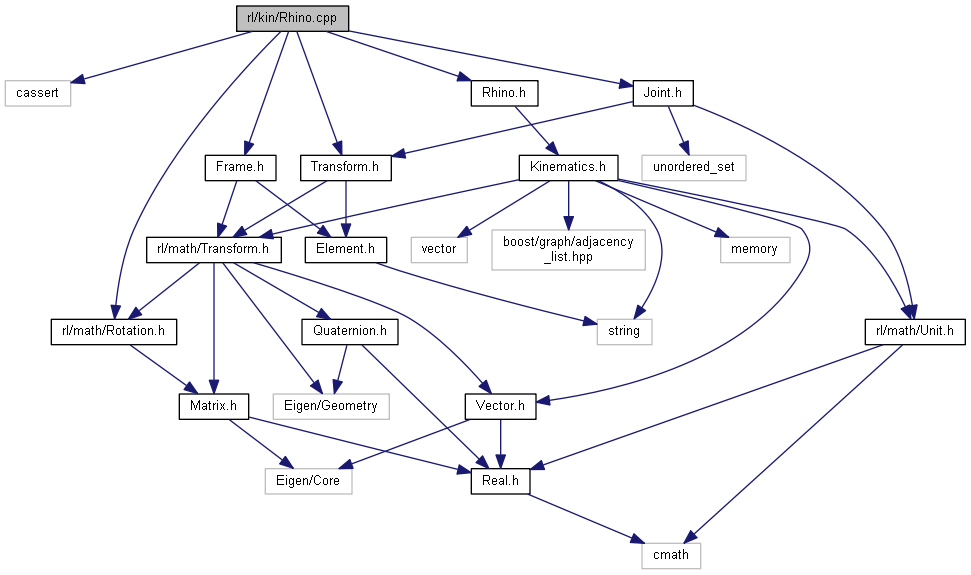
Namespaces | |
| rl | |
| Robotics Library. | |
| rl::kin | |
| Denavit-Hartenberg kinematics. | |