#include <ForceSensor.h>
◆ ForceSensor()
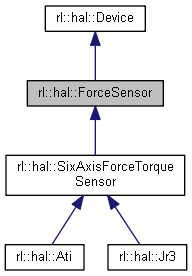
| rl::hal::ForceSensor::ForceSensor |
( |
| ) |
|
◆ ~ForceSensor()
| rl::hal::ForceSensor::~ForceSensor |
( |
| ) |
|
|
virtual |
◆ getForces()
| virtual void rl::hal::ForceSensor::getForces |
( |
::rl::math::Vector & |
forces | ) |
const |
|
pure virtual |
◆ getForcesCount()
| virtual ::std::size_t rl::hal::ForceSensor::getForcesCount |
( |
| ) |
const |
|
pure virtual |
◆ getForcesMaximum()
| virtual ::rl::math::Real rl::hal::ForceSensor::getForcesMaximum |
( |
const ::std::size_t & |
i | ) |
const |
|
pure virtual |
◆ getForcesMinimum()
| virtual ::rl::math::Real rl::hal::ForceSensor::getForcesMinimum |
( |
const ::std::size_t & |
i | ) |
const |
|
pure virtual |
The documentation for this class was generated from the following files:

 Public Member Functions inherited from rl::hal::Device
Public Member Functions inherited from rl::hal::Device