Robotics Library
0.7.0
rl
plan
Namespaces
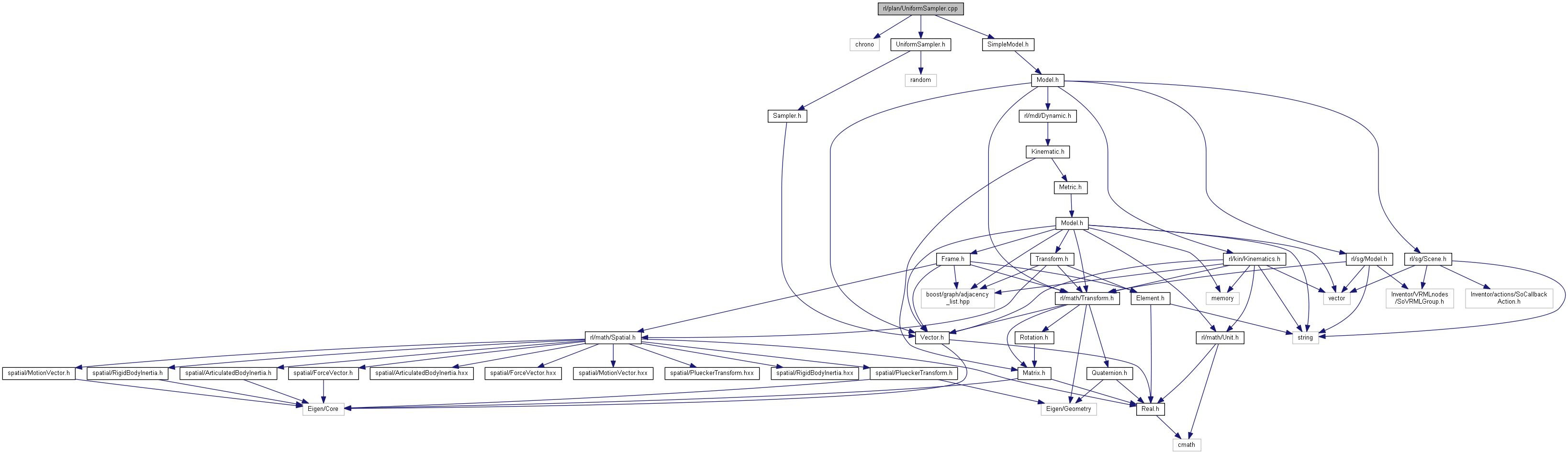
UniformSampler.cpp File Reference
#include <chrono>
#include "
SimpleModel.h
"
#include "
UniformSampler.h
"
Include dependency graph for UniformSampler.cpp:
Namespaces
rl
Robotics Library.
rl::plan
Collision-free path planning.
Generated by
1.8.20