 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
#include <chrono>#include <memory>#include <rtai_lxrt.h>#include <system_error>#include "chrono.h"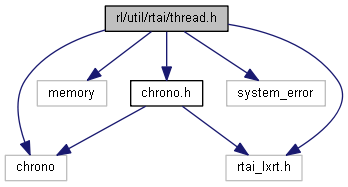
Go to the source code of this file.
Classes | |
| class | rl::util::rtai::thread |
| class | rl::util::rtai::thread::id |
| struct | rl::util::rtai::thread::Impl_base |
| struct | rl::util::rtai::thread::Impl< Callable > |
| struct | std::hash< ::rl::util::rtai::thread::id > |
Namespaces | |
| rl | |
| Robotics Library. | |
| rl::util | |
| rl::util::rtai | |
| rl::util::rtai::this_thread | |
| std | |
Functions | |
| thread::id | rl::util::rtai::this_thread::get_id () |
| int | rl::util::rtai::this_thread::get_priority () |
| int | rl::util::rtai::this_thread::get_priority_max () |
| int | rl::util::rtai::this_thread::get_priority_min () |
| void | rl::util::rtai::this_thread::set_priority (const int &priority) |
| template<typename Rep , typename Period > | |
| void | rl::util::rtai::this_thread::sleep_for (const ::std::chrono::duration< Rep, Period > &rtime) |
| template<typename Duration > | |
| void | rl::util::rtai::this_thread::sleep_until (const ::std::chrono::time_point< chrono::system_clock, Duration > &atime) |
| template<typename Clock , typename Duration > | |
| void | rl::util::rtai::this_thread::sleep_until (const ::std::chrono::time_point< Clock, Duration > &atime) |
| void | rl::util::rtai::this_thread::start_timer () |
| void | rl::util::rtai::this_thread::stop_timer () |
| void | rl::util::rtai::this_thread::wait_period () |
| void | rl::util::rtai::this_thread::yield () |
| void | std::swap (::rl::util::rtai::thread &x, ::rl::util::rtai::thread &y) |