 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
#include <cstdint>#include <string>#include <boost/dynamic_bitset.hpp>#include <rl/math/Matrix.h>#include "CyclicDevice.h"#include "Device.h"#include "SixAxisForceTorqueSensor.h"#include "Socket.h"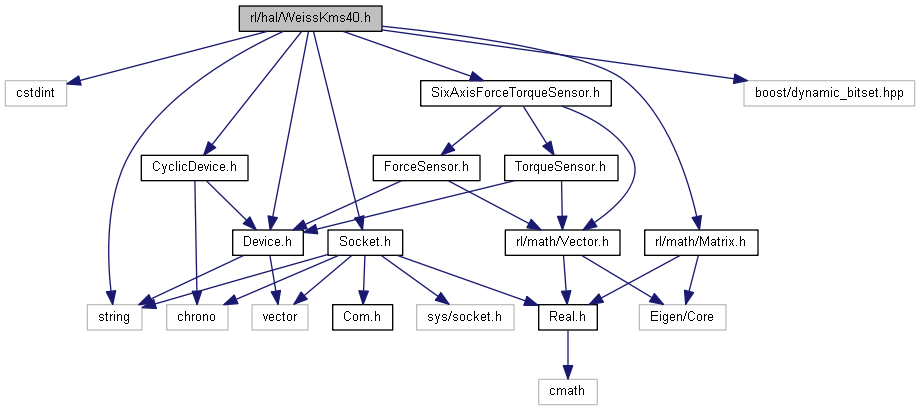
Go to the source code of this file.
Classes | |
| class | rl::hal::WeissKms40 |
| Weiss Robotics Force-Torque Sensor KMS 40. More... | |
Namespaces | |
| rl | |
| Robotics Library. | |
| rl::hal | |
| Hardware abstraction layer. | |