 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
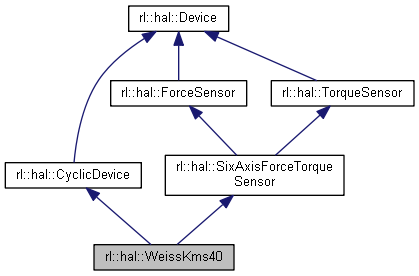
Weiss Robotics Force-Torque Sensor KMS 40. More...
#include <WeissKms40.h>
Public Types | |
| enum | SystemState { SYSTEM_STATE_SCRIPT_FAILURE = 1073741824, SYSTEM_STATE_CMD_FAILURE = 536870912, SYSTEM_STATE_POWER_FAULT = 268435456, SYSTEM_STATE_TEMP_FAULT = 134217728, SYSTEM_STATE_CALIBRATION_FAULT = 67108864, SYSTEM_STATE_OVERRUN_MZ = 33554432, SYSTEM_STATE_OVERRUN_MY = 16777216, SYSTEM_STATE_OVERRUN_MX = 8388608, SYSTEM_STATE_OVERRUN_FZ = 4194304, SYSTEM_STATE_OVERRUN_FY = 2097152, SYSTEM_STATE_OVERRUN_FX = 1048576, SYSTEM_STATE_TEMP_WARNING = 2048, SYSTEM_STATE_CALIBRATION_EXPIRED = 1024, SYSTEM_STATE_SCRIPT_RUNNING = 32, SYSTEM_STATE_DAQ_RUNNING = 16, SYSTEM_STATE_FILTER_ENABLED = 8, SYSTEM_STATE_TARA = 4, SYSTEM_STATE_STABLE = 2, SYSTEM_STATE_CALIBRATION_VALID = 1 } |
Public Member Functions | |
| WeissKms40 (const ::std::string &address="192.168.1.30", const unsigned short int &port=1000, const ::std::size_t &filter=0, const ::std::size_t ÷r=1) | |
| virtual | ~WeissKms40 () |
| void | close () |
| ::rl::math::Vector | doAcquireSingleFrame () |
| ::std::pair< ::std::chrono::system_clock::time_point, ::std::chrono::system_clock::duration > | doGetCalibrationDateLifetime () |
| ::rl::math::Matrix | doGetCalibrationMatrix () |
| ::boost::dynamic_bitset | doGetDataAcquisitionMask () |
| ::std::string | doGetDescriptorString () |
| ::std::size_t | doGetFilter () |
| ::std::string | doGetFirmwareVersion () |
| ::std::size_t | doGetFrameSendDivider () |
| ::std::size_t | doGetSerialNumber () |
| SystemState | doGetSystemFlags () |
| ::std::string | doGetSystemType () |
| bool | doGetTare () |
| float | doGetTemperature () |
| ::std::size_t | doGetVerboseLevel () |
| ::std::vector< ::std::string > | doPrintVariable (const ::std::vector< ::std::string > &variables) |
| ::boost::dynamic_bitset | doSetDataAcquisitionMask (const ::boost::dynamic_bitset<> &mask) |
| ::std::string | doSetDescriptorString (const ::std::string &value) |
| ::std::size_t | doSetFilter (const ::std::size_t &value) |
| ::std::size_t | doSetFrameSendDivider (const ::std::size_t &value) |
| bool | doSetTare (const bool &doOn) |
| ::std::size_t | doSetVerboseLevel (const ::std::size_t &level) |
| void | doStartContinuousDataAcquisition () |
| void | doStopContinuousDataAcquisition () |
| ::rl::math::Vector | getForces () const |
| ::rl::math::Vector | getForcesTorques () const |
| ::rl::math::Real | getForcesTorquesMaximum (const ::std::size_t &i) const |
| ::rl::math::Real | getForcesTorquesMinimum (const ::std::size_t &i) const |
| ::rl::math::Vector | getTorques () const |
| void | open () |
| void | start () |
| void | step () |
| void | stop () |
 Public Member Functions inherited from rl::hal::CyclicDevice Public Member Functions inherited from rl::hal::CyclicDevice | |
| CyclicDevice (const ::std::chrono::nanoseconds &updateRate) | |
| virtual | ~CyclicDevice () |
| virtual ::std::chrono::nanoseconds | getUpdateRate () const |
| Public Member Functions inherited from rl::hal::Device | |
| Device () | |
| virtual | ~Device () |
| bool | isConnected () const |
| bool | isRunning () const |
| Public Member Functions inherited from rl::hal::SixAxisForceTorqueSensor | |
| SixAxisForceTorqueSensor () | |
| virtual | ~SixAxisForceTorqueSensor () |
| ::std::size_t | getForcesCount () const |
| ::rl::math::Real | getForcesMaximum (const ::std::size_t &i) const |
| ::rl::math::Real | getForcesMinimum (const ::std::size_t &i) const |
| ::std::size_t | getTorquesCount () const |
| ::rl::math::Real | getTorquesMaximum (const ::std::size_t &i) const |
| ::rl::math::Real | getTorquesMinimum (const ::std::size_t &i) const |
| Public Member Functions inherited from rl::hal::ForceSensor | |
| ForceSensor () | |
| virtual | ~ForceSensor () |
| Public Member Functions inherited from rl::hal::TorqueSensor | |
| TorqueSensor () | |
| virtual | ~TorqueSensor () |
Private Member Functions | |
| ::std::string | recv (const ::std::string &command) |
Private Attributes | |
| ::std::size_t | divider |
| ::std::size_t | filter |
| ::rl::math::Vector | frame |
| Socket | socket |
Additional Inherited Members | |
| Protected Member Functions inherited from rl::hal::Device | |
| void | setConnected (const bool &connected) |
| void | setRunning (const bool &running) |
Weiss Robotics Force-Torque Sensor KMS 40.
See "KMS Command Set Reference Manual": <www.weiss-robotics.de/en/download.html?cid=70&fid=37&id=164>
| rl::hal::WeissKms40::WeissKms40 | ( | const ::std::string & | address = "192.168.1.30", |
| const unsigned short int & | port = 1000, |
||
| const ::std::size_t & | filter = 0, |
||
| const ::std::size_t & | divider = 1 |
||
| ) |
| [in] | address | TCP hostname |
| [in] | port | TCP port |
| [in] | filter | Value representing the ID of the filter that should be used |
| [in] | divider | Value representing the frame rate divider |
|
virtual |
|
virtual |
Implements rl::hal::Device.
| rl::math::Vector rl::hal::WeissKms40::doAcquireSingleFrame | ( | ) |
| std::pair<::std::chrono::system_clock::time_point,::std::chrono::system_clock::duration > rl::hal::WeissKms40::doGetCalibrationDateLifetime | ( | ) |
| rl::math::Matrix rl::hal::WeissKms40::doGetCalibrationMatrix | ( | ) |
| boost::dynamic_bitset rl::hal::WeissKms40::doGetDataAcquisitionMask | ( | ) |
| std::string rl::hal::WeissKms40::doGetDescriptorString | ( | ) |
| std::size_t rl::hal::WeissKms40::doGetFilter | ( | ) |
| std::string rl::hal::WeissKms40::doGetFirmwareVersion | ( | ) |
| std::size_t rl::hal::WeissKms40::doGetFrameSendDivider | ( | ) |
| std::size_t rl::hal::WeissKms40::doGetSerialNumber | ( | ) |
| WeissKms40::SystemState rl::hal::WeissKms40::doGetSystemFlags | ( | ) |
| std::string rl::hal::WeissKms40::doGetSystemType | ( | ) |
| bool rl::hal::WeissKms40::doGetTare | ( | ) |
| float rl::hal::WeissKms40::doGetTemperature | ( | ) |
| std::size_t rl::hal::WeissKms40::doGetVerboseLevel | ( | ) |
| std::vector<::std::string > rl::hal::WeissKms40::doPrintVariable | ( | const ::std::vector< ::std::string > & | variables | ) |
| boost::dynamic_bitset rl::hal::WeissKms40::doSetDataAcquisitionMask | ( | const ::boost::dynamic_bitset<> & | mask | ) |
| std::string rl::hal::WeissKms40::doSetDescriptorString | ( | const ::std::string & | value | ) |
| std::size_t rl::hal::WeissKms40::doSetFilter | ( | const ::std::size_t & | value | ) |
| std::size_t rl::hal::WeissKms40::doSetFrameSendDivider | ( | const ::std::size_t & | value | ) |
| bool rl::hal::WeissKms40::doSetTare | ( | const bool & | doOn | ) |
| std::size_t rl::hal::WeissKms40::doSetVerboseLevel | ( | const ::std::size_t & | level | ) |
| void rl::hal::WeissKms40::doStartContinuousDataAcquisition | ( | ) |
| void rl::hal::WeissKms40::doStopContinuousDataAcquisition | ( | ) |
|
virtual |
| [out] | forces | [N] |
Implements rl::hal::ForceSensor.
|
virtual |
| [in] | forcesTorques | [N],[N],[N],[Nm],[Nm],[Nm] |
Implements rl::hal::SixAxisForceTorqueSensor.
|
virtual |
Implements rl::hal::SixAxisForceTorqueSensor.
|
virtual |
Implements rl::hal::SixAxisForceTorqueSensor.
|
virtual |
| [out] | torques | [Nm] |
Implements rl::hal::TorqueSensor.
|
virtual |
Implements rl::hal::Device.
|
private |
|
virtual |
Implements rl::hal::Device.
|
virtual |
Implements rl::hal::CyclicDevice.
|
virtual |
Implements rl::hal::Device.
|
private |
|
private |
|
private |
|
private |