 |
Robotics Library
0.6.2
|
|
Robotics Library
0.6.2
|
#include <rl/kin/Kinematics.h>#include <rl/math/Transform.h>#include <rl/math/Vector.h>#include <rl/mdl/Dynamic.h>#include <rl/sg/Model.h>#include <rl/sg/Scene.h>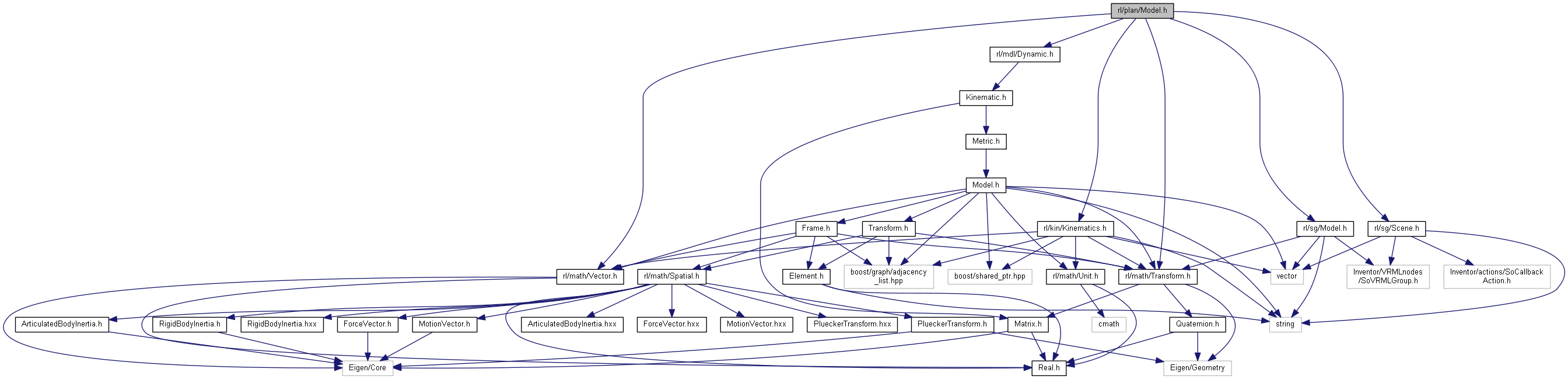

Go to the source code of this file.
Classes | |
| class | rl::plan::Model |
Namespaces | |
| rl | |
| rl::plan | |