#include <Planner.h>
◆ Planner()
| rl::plan::Planner::Planner |
( |
| ) |
|
◆ ~Planner()
| rl::plan::Planner::~Planner |
( |
| ) |
|
|
virtual |
◆ getName()
| virtual ::std::string rl::plan::Planner::getName |
( |
| ) |
const |
|
pure virtual |
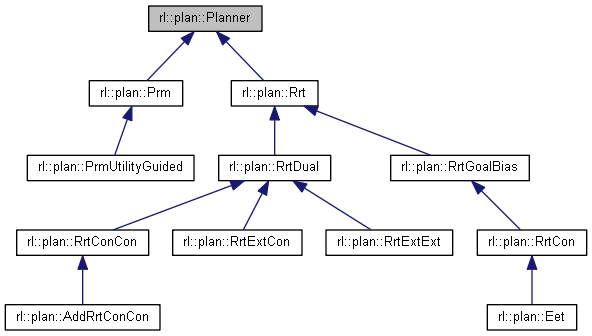
Implemented in rl::plan::RrtGoalBias, rl::plan::RrtExtExt, rl::plan::RrtExtCon, rl::plan::RrtDual, rl::plan::RrtConCon, rl::plan::RrtCon, rl::plan::Rrt, rl::plan::PrmUtilityGuided, rl::plan::Prm, rl::plan::Eet, and rl::plan::AddRrtConCon.
◆ getPath()
| virtual void rl::plan::Planner::getPath |
( |
VectorList & |
path | ) |
|
|
pure virtual |
◆ reset()
| virtual void rl::plan::Planner::reset |
( |
| ) |
|
|
pure virtual |
◆ solve()
| virtual bool rl::plan::Planner::solve |
( |
| ) |
|
|
pure virtual |
◆ verify()
| bool rl::plan::Planner::verify |
( |
| ) |
|
Vertify that start and goal configuration are within joint limits and collision free.
◆ duration
Upper bound for search [s].
◆ goal
◆ model
◆ start
◆ timer
◆ viewer
| Viewer* rl::plan::Planner::viewer |
The documentation for this class was generated from the following files: