 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
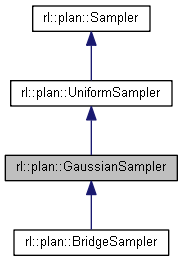
Gaussian sampling strategy. More...
#include <GaussianSampler.h>
Public Member Functions | |
| GaussianSampler () | |
| virtual | ~GaussianSampler () |
| ::rl::math::Vector | generateCollisionFree () |
| virtual void | seed (const ::std::mt19937::result_type &value) |
 Public Member Functions inherited from rl::plan::UniformSampler Public Member Functions inherited from rl::plan::UniformSampler | |
| UniformSampler () | |
| virtual | ~UniformSampler () |
| ::rl::math::Vector | generate () |
| Public Member Functions inherited from rl::plan::Sampler | |
| Sampler () | |
| virtual | ~Sampler () |
| virtual ::rl::math::Vector | generateCollisionFree () |
Public Attributes | |
| ::rl::math::Vector * | sigma |
| Public Attributes inherited from rl::plan::Sampler | |
| SimpleModel * | model |
Protected Member Functions | |
| ::std::normal_distribution< ::rl::math::Real >::result_type | gauss () |
| Protected Member Functions inherited from rl::plan::UniformSampler | |
| ::std::uniform_real_distribution< ::rl::math::Real >::result_type | rand () |
Protected Attributes | |
| ::std::normal_distribution< ::rl::math::Real > | gaussDistribution |
| ::std::mt19937 | gaussEngine |
| Protected Attributes inherited from rl::plan::UniformSampler | |
| ::std::uniform_real_distribution< ::rl::math::Real > | randDistribution |
| ::std::mt19937 | randEngine |
Gaussian sampling strategy.
Valérie Boor, Mark H. Overmars, and A. Frank van der Stappen. The Gaussian sampling strategy for probabilistic roadmap planners. In Proceedings of the IEEE International Conference on Robotics and Automation, pages 1018-1023, Detroit, MI, USA, May 1999.
| rl::plan::GaussianSampler::GaussianSampler | ( | ) |
|
virtual |
|
protected |
| rl::math::Vector rl::plan::GaussianSampler::generateCollisionFree | ( | ) |
|
virtual |
Reimplemented from rl::plan::UniformSampler.
|
protected |
|
protected |
| ::rl::math::Vector* rl::plan::GaussianSampler::sigma |