 |
Robotics Library
0.6.2
|
|
Robotics Library
0.6.2
|
#include <boost/make_shared.hpp>#include <rl/math/Quaternion.h>#include <rl/math/Rotation.h>#include <rl/math/Unit.h>#include <rl/util/Timer.h>#include "DistanceModel.h"#include "Eet.h"#include "Exception.h"#include "Sampler.h"#include "SimpleModel.h"#include "Viewer.h"#include "WorkspaceSphereExplorer.h"#include "WorkspaceSphereVector.h"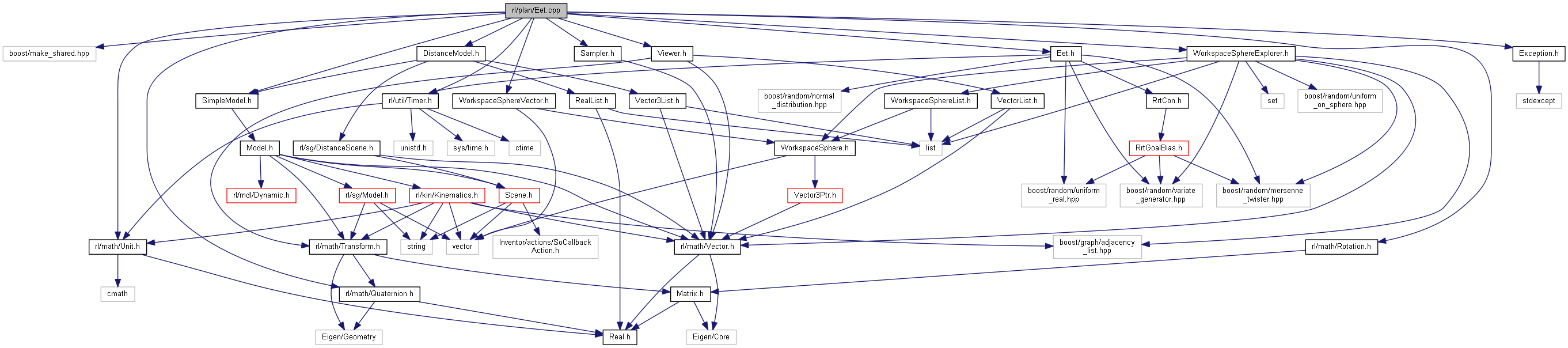
Namespaces | |
| rl | |
| rl::plan | |
Macros | |
| #define | nullptr NULL |
| #define nullptr NULL |