 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
#include <boost/graph/dijkstra_shortest_paths.hpp>#include "BridgeSampler.h"#include "GaussianSampler.h"#include "Prm.h"#include "Sampler.h"#include "SimpleModel.h"#include "UniformSampler.h"#include "Verifier.h"#include "Viewer.h"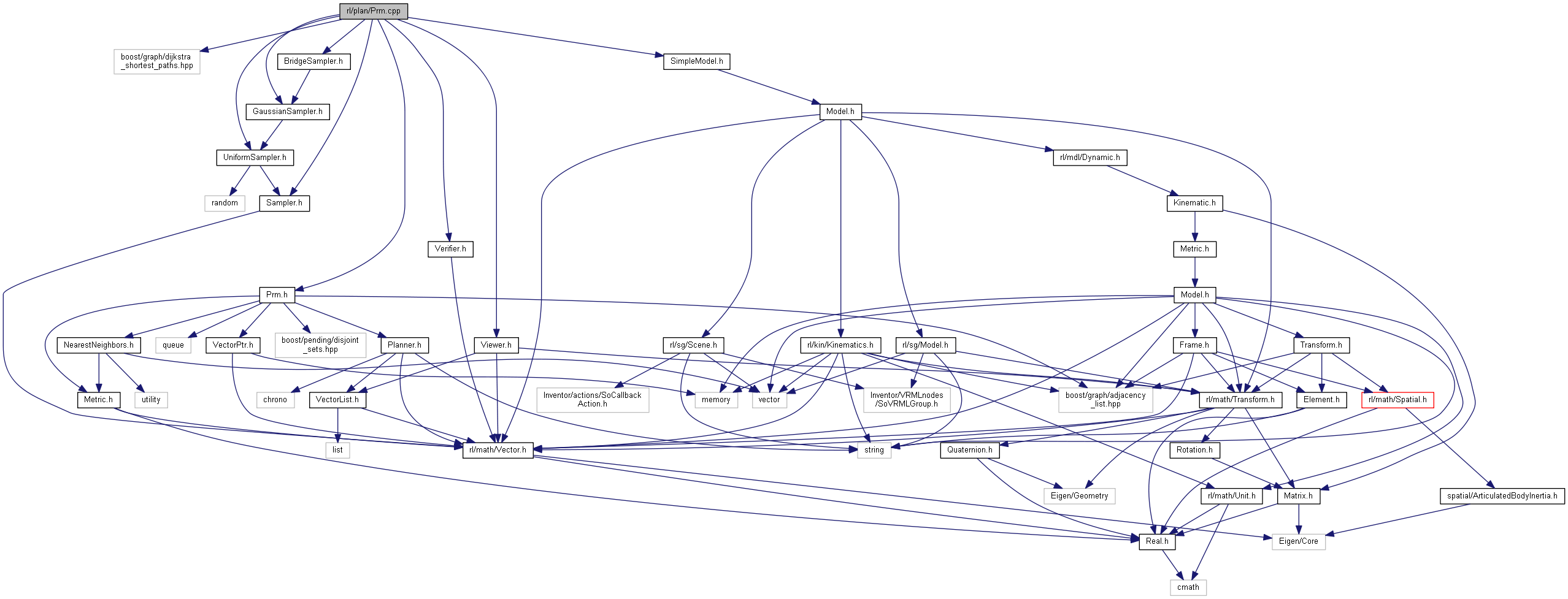
Namespaces | |
| rl | |
| Robotics Library. | |
| rl::plan | |
| Collision-free path planning. | |