 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
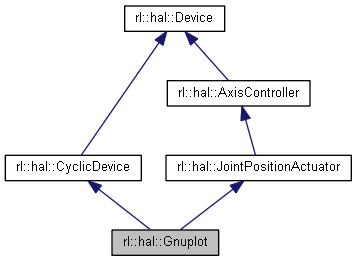
#include <Gnuplot.h>
Public Member Functions | |
| Gnuplot (const ::std::size_t &dof, const ::std::chrono::nanoseconds &updateRate, const ::rl::math::Real &ymin, const ::rl::math::Real &ymax, const ::std::size_t &max=200) | |
| virtual | ~Gnuplot () |
| void | close () |
| void | open () |
| void | setJointPosition (const ::rl::math::Vector &q) |
| void | setRange (const ::rl::math::Real &ymin, const ::rl::math::Real &ymax) |
| void | start () |
| void | step () |
| void | stop () |
 Public Member Functions inherited from rl::hal::CyclicDevice Public Member Functions inherited from rl::hal::CyclicDevice | |
| CyclicDevice (const ::std::chrono::nanoseconds &updateRate) | |
| virtual | ~CyclicDevice () |
| virtual ::std::chrono::nanoseconds | getUpdateRate () const |
| Public Member Functions inherited from rl::hal::Device | |
| Device () | |
| virtual | ~Device () |
| bool | isConnected () const |
| bool | isRunning () const |
| Public Member Functions inherited from rl::hal::JointPositionActuator | |
| JointPositionActuator (const ::std::size_t &dof) | |
| virtual | ~JointPositionActuator () |
| Public Member Functions inherited from rl::hal::AxisController | |
| AxisController (const ::std::size_t &dof) | |
| virtual | ~AxisController () |
| ::std::size_t | getDof () const |
Private Attributes | |
| FILE * | fp |
| ::std::list< ::rl::math::Vector > | history |
| ::std::size_t | max |
| ::rl::math::Real | ymax |
| ::rl::math::Real | ymin |
Additional Inherited Members | |
| Protected Member Functions inherited from rl::hal::Device | |
| void | setConnected (const bool &connected) |
| void | setRunning (const bool &running) |
| rl::hal::Gnuplot::Gnuplot | ( | const ::std::size_t & | dof, |
| const ::std::chrono::nanoseconds & | updateRate, | ||
| const ::rl::math::Real & | ymin, | ||
| const ::rl::math::Real & | ymax, | ||
| const ::std::size_t & | max = 200 |
||
| ) |
|
virtual |
|
virtual |
Implements rl::hal::Device.
|
virtual |
Implements rl::hal::Device.
|
virtual |
Implements rl::hal::JointPositionActuator.
| void rl::hal::Gnuplot::setRange | ( | const ::rl::math::Real & | ymin, |
| const ::rl::math::Real & | ymax | ||
| ) |
|
virtual |
Implements rl::hal::Device.
|
virtual |
Implements rl::hal::CyclicDevice.
|
virtual |
Implements rl::hal::Device.
|
private |
|
private |
|
private |
|
private |
|
private |