 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
#include <array>#include <cstdint>#include <string>#include "Com.h"#include "ComException.h"#include "Socket.h"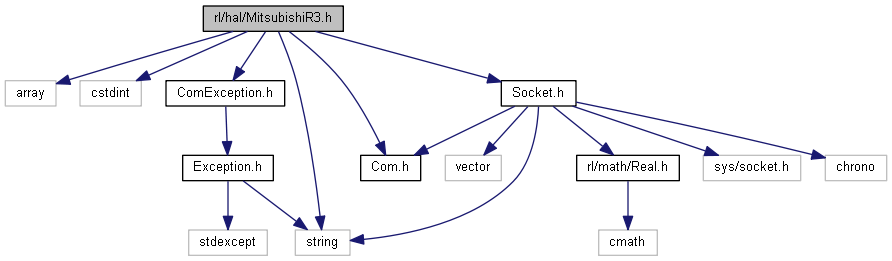
Go to the source code of this file.
Classes | |
| class | rl::hal::MitsubishiR3 |
| Mitsubishi Electric R3 protocol. More... | |
| struct | rl::hal::MitsubishiR3::EditSts |
| class | rl::hal::MitsubishiR3::Exception |
| struct | rl::hal::MitsubishiR3::Hand |
| struct | rl::hal::MitsubishiR3::RunSts |
| struct | rl::hal::MitsubishiR3::StopSts |
| struct | rl::hal::MitsubishiR3::CalibState |
| struct | rl::hal::MitsubishiR3::RunState |
| struct | rl::hal::MitsubishiR3::StopSignalState |
| struct | rl::hal::MitsubishiR3::StopState |
Namespaces | |
| rl | |
| Robotics Library. | |
| rl::hal | |
| Hardware abstraction layer. | |