 |
Robotics Library
0.6.2
|
|
Robotics Library
0.6.2
|
#include <MitsubishiH7.h>
Classes | |
| struct | CalibState |
| struct | EditSts |
| struct | Hand |
| struct | MxtCommand |
| struct | MxtJoint |
| struct | MxtPose |
| struct | MxtPulse |
| struct | MxtWorld |
| struct | RunState |
| struct | RunSts |
| struct | StopSignalState |
| struct | StopState |
| struct | StopSts |
Public Types | |
| enum | Mode { MODE_JOINT = 1, MODE_POSE = 0, MODE_PULSE = 2 } |
| enum | HandSts { HANDSTS_NOTUSED = -1, HANDSTS_OPEN = 1, HANDSTS_CLOSED = 2 } |
| enum | HandType { HANDTYPE_NOTUSED = -1, HANDTYPE_SINGLE = 0, HANDTYPE_DOUBLE = 1 } |
| enum | TaskCond { TASKCOND_START, TASKCOND_ALWAYS, TASKCOND_ERROR } |
| typedef bool | MechInfo[3] |
| Mech info (Mech 1, Mech 2, Mech 3). More... | |
| typedef Hand | HandState[8] |
Public Member Functions | |
| MitsubishiH7 (const ::std::size_t &dof, const ::std::string &server, const ::std::string &client, const unsigned short int &tcp=10001, const unsigned short int &udp=10000, const Mode &mode=MODE_JOINT, const uint16_t &haltIoData=0x00AA, const uint16_t &releaseIoData=0x00A6, const uint16_t &shutIoData=0x000A9) | |
| virtual | ~MitsubishiH7 () |
| void | calibCmd (CalibState &state) const |
| The install status is read. More... | |
| void | close () |
| void | cntlCmd (const bool &doOn) const |
| Operation enable or disable. More... | |
| void | datinstCmd (const ::std::string &j1, const ::std::string &j2, const ::std::string &j3, const ::std::string &j4, const ::std::string &j5, const ::std::string &j6, const ::std::string &checksum) const |
| The origin is set by the data input. More... | |
| void | datinstCmd (const ::std::string &j1, const ::std::string &j2, const ::std::string &j3, const ::std::string &j4, const ::std::string &j5, const ::std::string &j6, const ::std::string &j7, const ::std::string &j8, const ::std::string &checksum) const |
| The origin is set by the data input. More... | |
| void | dstateCmd (StopState &state) const |
| The stop state is read. More... | |
| void | eclrCmd () const |
| Clear program contents. More... | |
| void | emdatCmd (const ::std::string &program) const |
| More line and position are registered in the program. More... | |
| ::std::string | errormesCmd (const int &errorNo) const |
| The content of the error is read. More... | |
| void | execCmd (const ::std::string &instruction) const |
| The instruction is executed directly. More... | |
| void | getCartesianPosition (::rl::math::Transform &x) const |
| void | getCurrentFeedback (::Eigen::Matrix< int32_t, ::Eigen::Dynamic, 1 > &c) const |
| ::std::size_t | getFilter () const |
| uint16_t | getIoData () const |
| void | getJointPosition (::rl::math::Vector &q) const |
| Mode | getMode () const |
| void | getMotorPulse (::Eigen::Matrix< int32_t, ::Eigen::Dynamic, 1 > &p) const |
| void | halt () |
| void | hndCmd (const bool &doOpen, const int &handNo) const |
| The hand is openend and closed. More... | |
| void | hndstsCmd (HandState &state) const |
| The setting and the output of the hand are read. More... | |
| void | inEqualsCmd (const ::std::size_t &inNo, const ::std::string &inVal) const |
| The input signal is pseudo-input. More... | |
| void | loadCmd (const ::std::string &programName) const |
| Open the program for edit. More... | |
| void | loadProgram (const ::std::string &name, const ::std::string &program) const |
| void | newCmd () const |
| The program is closed annulling the content of the edit. More... | |
| void | open () |
| void | outEqualsCmd (const ::std::size_t &outNo, const ::std::string &outVal) const |
| The output signal is compelling output. More... | |
| void | release () |
| void | rstalrmCmd () const |
| The error is reset. More... | |
| void | rstpwrCmd () const |
| Power supply reset (reboot) of the controller is executed. More... | |
| void | runCmd (const ::std::string &programName, const bool &doModeCycle=false) const |
| The program is started. More... | |
| void | saveCmd () const |
| The content of the edit is preserved and the program is closed. More... | |
| void | setCartesianPosition (const ::rl::math::Transform &x) |
| void | setFilter (const ::std::size_t &filter) |
| void | setInput (const uint16_t &bitTop) |
| void | setJointPosition (const ::rl::math::Vector &q) |
| void | setMode (const Mode &mode) |
| void | setMotorPulse (const ::Eigen::Matrix< int32_t, ::Eigen::Dynamic, 1 > &p) |
| void | setOutput (const uint16_t &bitTop, const uint16_t &bitMask, const uint16_t &ioData) |
| void | shut () |
| void | slotinitCmd () const |
| The program resets all slots. More... | |
| void | srvCmd (const bool &doOn) const |
| The servo power supply is turned on and off. More... | |
| void | start () |
| void | startProgram (const ::std::string &name) const |
| void | stateCmd (RunState &state) const |
| The run state is read. More... | |
| void | step () |
| void | stopCmd () const |
| The start is stopped. More... | |
| void | stop () |
| void | stopProgram () const |
| void | stpsigCmd (StopSignalState &state) const |
| The state of the stop signal is read. More... | |
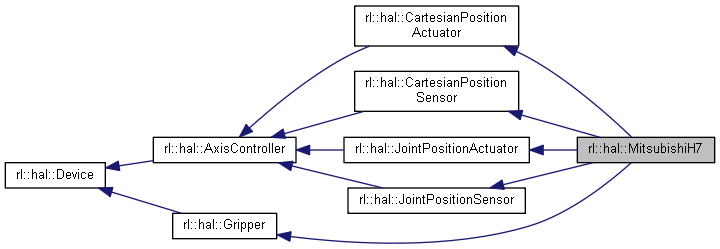
 Public Member Functions inherited from rl::hal::CartesianPositionActuator Public Member Functions inherited from rl::hal::CartesianPositionActuator | |
| CartesianPositionActuator (const ::std::size_t &dof, const ::rl::math::Real &updateRate) | |
| virtual | ~CartesianPositionActuator () |
| Public Member Functions inherited from rl::hal::AxisController | |
| AxisController (const ::std::size_t &dof, const ::rl::math::Real &updateRate) | |
| virtual | ~AxisController () |
| ::std::size_t | getDof () const |
| virtual ::rl::math::Real | getUpdateRate () const |
| Public Member Functions inherited from rl::hal::Device | |
| Device () | |
| virtual | ~Device () |
| bool | isConnected () const |
| bool | isRunning () const |
| Public Member Functions inherited from rl::hal::CartesianPositionSensor | |
| CartesianPositionSensor (const ::std::size_t &dof, const ::rl::math::Real &updateRate) | |
| virtual | ~CartesianPositionSensor () |
| Public Member Functions inherited from rl::hal::Gripper | |
| Gripper () | |
| virtual | ~Gripper () |
| Public Member Functions inherited from rl::hal::JointPositionActuator | |
| JointPositionActuator (const ::std::size_t &dof, const ::rl::math::Real &updateRate) | |
| virtual | ~JointPositionActuator () |
| Public Member Functions inherited from rl::hal::JointPositionSensor | |
| JointPositionSensor (const ::std::size_t &dof, const ::rl::math::Real &updateRate) | |
| virtual | ~JointPositionSensor () |
Private Attributes | |
| ::std::string | client |
| Client ip address or hostname. More... | |
| ::std::size_t | filter |
| Internal filter value. More... | |
| uint16_t | haltIoData |
| MxtCommand | in |
| Mode | mode |
| MxtCommand | out |
| uint16_t | releaseIoData |
| ::std::string | server |
| Server ip address or hostname. More... | |
| uint16_t | shutIoData |
| TcpSocket * | tcp |
| UdpSocket * | udp |
Additional Inherited Members | |
| Protected Member Functions inherited from rl::hal::Device | |
| void | setConnected (const bool &connected) |
| void | setRunning (const bool &running) |
| typedef Hand rl::hal::MitsubishiH7::HandState[8] |
| typedef bool rl::hal::MitsubishiH7::MechInfo[3] |
Mech info (Mech 1, Mech 2, Mech 3).
| rl::hal::MitsubishiH7::MitsubishiH7 | ( | const ::std::size_t & | dof, |
| const ::std::string & | server, | ||
| const ::std::string & | client, | ||
| const unsigned short int & | tcp = 10001, |
||
| const unsigned short int & | udp = 10000, |
||
| const Mode & | mode = MODE_JOINT, |
||
| const uint16_t & | haltIoData = 0x00AA, |
||
| const uint16_t & | releaseIoData = 0x00A6, |
||
| const uint16_t & | shutIoData = 0x000A9 |
||
| ) |
|
virtual |
| void rl::hal::MitsubishiH7::calibCmd | ( | CalibState & | state | ) | const |
The install status is read.
| state | install state |
|
virtual |
Implements rl::hal::Device.
| void rl::hal::MitsubishiH7::cntlCmd | ( | const bool & | doOn | ) | const |
Operation enable or disable.
When the command which needs the operation right such as program start, servo ON and more is used, the operation right should be made effective.
| doOn | OFF / ON |
| void rl::hal::MitsubishiH7::datinstCmd | ( | const ::std::string & | j1, |
| const ::std::string & | j2, | ||
| const ::std::string & | j3, | ||
| const ::std::string & | j4, | ||
| const ::std::string & | j5, | ||
| const ::std::string & | j6, | ||
| const ::std::string & | checksum | ||
| ) | const |
The origin is set by the data input.
| j1 | j1 data |
| j2 | j2 data |
| j3 | j3 data |
| j4 | j4 data |
| j5 | j5 data |
| j6 | j6 data |
| checksum | checksum |
| void rl::hal::MitsubishiH7::datinstCmd | ( | const ::std::string & | j1, |
| const ::std::string & | j2, | ||
| const ::std::string & | j3, | ||
| const ::std::string & | j4, | ||
| const ::std::string & | j5, | ||
| const ::std::string & | j6, | ||
| const ::std::string & | j7, | ||
| const ::std::string & | j8, | ||
| const ::std::string & | checksum | ||
| ) | const |
The origin is set by the data input.
| j1 | j1 data |
| j2 | j2 data |
| j3 | j3 data |
| j4 | j4 data |
| j5 | j5 data |
| j6 | j6 data |
| j7 | j7 data |
| j8 | j8 data |
| checksum | checksum |
| void rl::hal::MitsubishiH7::dstateCmd | ( | StopState & | state | ) | const |
The stop state is read.
| state | stop state |
| void rl::hal::MitsubishiH7::eclrCmd | ( | ) | const |
Clear program contents.
It is effective in the edit slot.
| void rl::hal::MitsubishiH7::emdatCmd | ( | const ::std::string & | program | ) | const |
More line and position are registered in the program.
It is effective in the edit slot.
| program | line data and positional data (<line or position>[0b<line or position>...]) |
| std::string rl::hal::MitsubishiH7::errormesCmd | ( | const int & | errorNo | ) | const |
The content of the error is read.
| errorNo | error number |
| void rl::hal::MitsubishiH7::execCmd | ( | const ::std::string & | instruction | ) | const |
The instruction is executed directly.
| instruction | instruction of MELFA-BASIC IV or MOVEMASTER commands |
|
virtual |
Implements rl::hal::CartesianPositionSensor.
| void rl::hal::MitsubishiH7::getCurrentFeedback | ( | ::Eigen::Matrix< int32_t, ::Eigen::Dynamic, 1 > & | c | ) | const |
| std::size_t rl::hal::MitsubishiH7::getFilter | ( | ) | const |
| uint16_t rl::hal::MitsubishiH7::getIoData | ( | ) | const |
|
virtual |
Implements rl::hal::JointPositionSensor.
| MitsubishiH7::Mode rl::hal::MitsubishiH7::getMode | ( | ) | const |
| void rl::hal::MitsubishiH7::getMotorPulse | ( | ::Eigen::Matrix< int32_t, ::Eigen::Dynamic, 1 > & | p | ) | const |
|
virtual |
Implements rl::hal::Gripper.
| void rl::hal::MitsubishiH7::hndCmd | ( | const bool & | doOpen, |
| const int & | handNo | ||
| ) | const |
The hand is openend and closed.
| doOpen | CLOSE / OPEN |
| handNo | hand number (1 - 8) is specified |
| void rl::hal::MitsubishiH7::hndstsCmd | ( | HandState & | state | ) | const |
The setting and the output of the hand are read.
| state | hand state |
| void rl::hal::MitsubishiH7::inEqualsCmd | ( | const ::std::size_t & | inNo, |
| const ::std::string & | inVal | ||
| ) | const |
The input signal is pseudo-input.
| inNo | input signal number |
| inVal | pseudo-input signal value by 4 hex number fixation |
| void rl::hal::MitsubishiH7::loadCmd | ( | const ::std::string & | programName | ) | const |
Open the program for edit.
| programName | edit program name |
| void rl::hal::MitsubishiH7::loadProgram | ( | const ::std::string & | name, |
| const ::std::string & | program | ||
| ) | const |
| void rl::hal::MitsubishiH7::newCmd | ( | ) | const |
The program is closed annulling the content of the edit.
|
virtual |
Implements rl::hal::Device.
| void rl::hal::MitsubishiH7::outEqualsCmd | ( | const ::std::size_t & | outNo, |
| const ::std::string & | outVal | ||
| ) | const |
The output signal is compelling output.
| outNo | output signal number |
| outVal | output signal value by 4 hex number fixation |
|
virtual |
Implements rl::hal::Gripper.
| void rl::hal::MitsubishiH7::rstalrmCmd | ( | ) | const |
The error is reset.
| void rl::hal::MitsubishiH7::rstpwrCmd | ( | ) | const |
Power supply reset (reboot) of the controller is executed.
| void rl::hal::MitsubishiH7::runCmd | ( | const ::std::string & | programName, |
| const bool & | doModeCycle = false |
||
| ) | const |
The program is started.
| programName | program name |
| doModeCycle | repeat start / cycle start |
| void rl::hal::MitsubishiH7::saveCmd | ( | ) | const |
The content of the edit is preserved and the program is closed.
|
virtual |
Implements rl::hal::CartesianPositionActuator.
| void rl::hal::MitsubishiH7::setFilter | ( | const ::std::size_t & | filter | ) |
| void rl::hal::MitsubishiH7::setInput | ( | const uint16_t & | bitTop | ) |
|
virtual |
Implements rl::hal::JointPositionActuator.
| void rl::hal::MitsubishiH7::setMode | ( | const Mode & | mode | ) |
| void rl::hal::MitsubishiH7::setMotorPulse | ( | const ::Eigen::Matrix< int32_t, ::Eigen::Dynamic, 1 > & | p | ) |
| void rl::hal::MitsubishiH7::setOutput | ( | const uint16_t & | bitTop, |
| const uint16_t & | bitMask, | ||
| const uint16_t & | ioData | ||
| ) |
|
virtual |
Implements rl::hal::Gripper.
| void rl::hal::MitsubishiH7::slotinitCmd | ( | ) | const |
The program resets all slots.
| void rl::hal::MitsubishiH7::srvCmd | ( | const bool & | doOn | ) | const |
The servo power supply is turned on and off.
| doOn | OFF / ON |
|
virtual |
Implements rl::hal::Device.
| void rl::hal::MitsubishiH7::startProgram | ( | const ::std::string & | name | ) | const |
| void rl::hal::MitsubishiH7::stateCmd | ( | RunState & | state | ) | const |
The run state is read.
| state | run state |
|
virtual |
Implements rl::hal::Device.
|
virtual |
Implements rl::hal::Device.
| void rl::hal::MitsubishiH7::stopCmd | ( | ) | const |
The start is stopped.
| void rl::hal::MitsubishiH7::stopProgram | ( | ) | const |
| void rl::hal::MitsubishiH7::stpsigCmd | ( | StopSignalState & | state | ) | const |
The state of the stop signal is read.
| state | stop signal state |
|
private |
Client ip address or hostname.
|
private |
Internal filter value.
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
Server ip address or hostname.
|
private |
|
private |
|
private |