 |
Robotics Library
0.7.0
|
|
Robotics Library
0.7.0
|
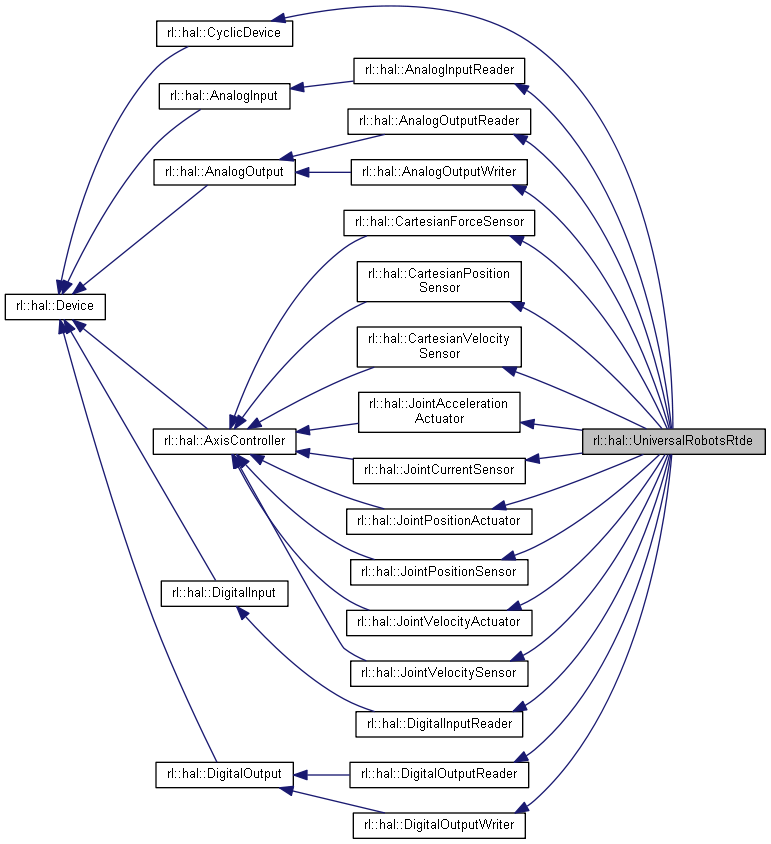
Universal Robots RTDE interface (3.3). More...
#include <UniversalRobotsRtde.h>
Classes | |
| struct | Input |
| struct | Output |
| struct | Version |
Public Member Functions | |
| UniversalRobotsRtde (const ::std::string &address) | |
| virtual | ~UniversalRobotsRtde () |
| void | close () |
| void | doScript (const ::std::string &script) |
| ::rl::math::Real | getAnalogInput (const ::std::size_t &i) const |
| ::std::size_t | getAnalogInputCount () const |
| ::rl::math::Real | getAnalogInputMaximum (const ::std::size_t &i) const |
| ::rl::math::Real | getAnalogInputMinimum (const ::std::size_t &i) const |
| ::std::vector< ::rl::math::Unit > | getAnalogInputUnit () const |
| ::rl::math::Unit | getAnalogInputUnit (const ::std::size_t &i) const |
| ::rl::math::Real | getAnalogOutput (const ::std::size_t &i) const |
| ::std::size_t | getAnalogOutputCount () const |
| ::rl::math::Real | getAnalogOutputMaximum (const ::std::size_t &i) const |
| ::rl::math::Real | getAnalogOutputMinimum (const ::std::size_t &i) const |
| ::std::vector< ::rl::math::Unit > | getAnalogOutputUnit () const |
| ::rl::math::Unit | getAnalogOutputUnit (const ::std::size_t &i) const |
| ::rl::math::ForceVector | getCartesianForce () const |
| ::rl::math::Transform | getCartesianPosition () const |
| ::rl::math::Transform | getCartesianPositionTarget () const |
| ::rl::math::MotionVector | getCartesianVelocity () const |
| ::rl::math::MotionVector | getCartesianVelocityTarget () const |
| ::boost::dynamic_bitset | getDigitalInput () const |
| bool | getDigitalInput (const ::std::size_t &i) const |
| ::std::size_t | getDigitalInputCount () const |
| ::boost::dynamic_bitset | getDigitalOutput () const |
| bool | getDigitalOutput (const ::std::size_t &i) const |
| ::std::size_t | getDigitalOutputCount () const |
| ::rl::math::Vector | getJointCurrent () const |
| ::std::int32_t | getJointMode (const ::std::size_t &i) const |
| ::rl::math::Vector | getJointPosition () const |
| ::rl::math::Vector | getJointTemperature () const |
| ::rl::math::Vector | getJointVelocity () const |
| RobotMode | getRobotMode () const |
| ::std::uint32_t | getRobotStatusBits () const |
| RuntimeState | getRuntimeState () const |
| SafetyMode | getSafetyMode () const |
| ::std::uint32_t | getSafetyStatusBits () const |
| void | open () |
| void | setAnalogOutput (const ::std::size_t &i, const ::rl::math::Real &value) |
| void | setAnalogOutputUnit (const ::std::vector< ::rl::math::Unit > &values) |
| void | setAnalogOutputUnit (const ::std::size_t &i, const ::rl::math::Unit &value) |
| void | setDigitalOutput (const ::std::size_t &i, const bool &value) |
| void | setJointAcceleration (const ::rl::math::Vector &qdd) |
| void | setJointPosition (const ::rl::math::Vector &q) |
| void | setJointVelocity (const ::rl::math::Vector &qd) |
| void | start () |
| void | step () |
| void | stop () |
| virtual ::std::vector< ::rl::math::Real > | getAnalogInput () const |
| virtual ::rl::math::Real | getAnalogInput (const ::std::size_t &i) const=0 |
| virtual ::std::vector< ::rl::math::Real > | getAnalogOutput () const |
| virtual ::rl::math::Real | getAnalogOutput (const ::std::size_t &i) const=0 |
| virtual void | setAnalogOutput (const ::std::vector< ::rl::math::Real > &values) |
| virtual void | setAnalogOutput (const ::std::size_t &i, const ::rl::math::Real &value)=0 |
| virtual void | setDigitalOutput (const ::boost::dynamic_bitset<> &bitset) |
| virtual void | setDigitalOutput (const ::boost::dynamic_bitset<> &bitset, const ::boost::dynamic_bitset<> &bitmask) |
| virtual void | setDigitalOutput (const ::std::size_t &i, const bool &value)=0 |
 Public Member Functions inherited from rl::hal::CyclicDevice Public Member Functions inherited from rl::hal::CyclicDevice | |
| CyclicDevice (const ::std::chrono::nanoseconds &updateRate) | |
| virtual | ~CyclicDevice () |
| virtual ::std::chrono::nanoseconds | getUpdateRate () const |
| Public Member Functions inherited from rl::hal::Device | |
| Device () | |
| virtual | ~Device () |
| bool | isConnected () const |
| bool | isRunning () const |
| Public Member Functions inherited from rl::hal::AnalogInputReader | |
| AnalogInputReader () | |
| virtual | ~AnalogInputReader () |
| virtual ::std::vector< ::rl::math::Real > | getAnalogInput () const |
| Public Member Functions inherited from rl::hal::AnalogInput | |
| AnalogInput () | |
| virtual | ~AnalogInput () |
| Public Member Functions inherited from rl::hal::AnalogOutputReader | |
| AnalogOutputReader () | |
| virtual | ~AnalogOutputReader () |
| virtual ::std::vector< ::rl::math::Real > | getAnalogOutput () const |
| Public Member Functions inherited from rl::hal::AnalogOutput | |
| AnalogOutput () | |
| virtual | ~AnalogOutput () |
| Public Member Functions inherited from rl::hal::AnalogOutputWriter | |
| AnalogOutputWriter () | |
| virtual | ~AnalogOutputWriter () |
| virtual void | setAnalogOutput (const ::std::vector< ::rl::math::Real > &values) |
| Public Member Functions inherited from rl::hal::CartesianForceSensor | |
| CartesianForceSensor (const ::std::size_t &dof) | |
| virtual | ~CartesianForceSensor () |
| Public Member Functions inherited from rl::hal::AxisController | |
| AxisController (const ::std::size_t &dof) | |
| virtual | ~AxisController () |
| ::std::size_t | getDof () const |
| Public Member Functions inherited from rl::hal::CartesianPositionSensor | |
| CartesianPositionSensor (const ::std::size_t &dof) | |
| virtual | ~CartesianPositionSensor () |
| Public Member Functions inherited from rl::hal::CartesianVelocitySensor | |
| CartesianVelocitySensor (const ::std::size_t &dof) | |
| virtual | ~CartesianVelocitySensor () |
| Public Member Functions inherited from rl::hal::DigitalInputReader | |
| DigitalInputReader () | |
| virtual | ~DigitalInputReader () |
| Public Member Functions inherited from rl::hal::DigitalInput | |
| DigitalInput () | |
| virtual | ~DigitalInput () |
| Public Member Functions inherited from rl::hal::DigitalOutputReader | |
| DigitalOutputReader () | |
| virtual | ~DigitalOutputReader () |
| Public Member Functions inherited from rl::hal::DigitalOutput | |
| DigitalOutput () | |
| virtual | ~DigitalOutput () |
| Public Member Functions inherited from rl::hal::DigitalOutputWriter | |
| DigitalOutputWriter () | |
| virtual | ~DigitalOutputWriter () |
| virtual void | setDigitalOutput (const ::boost::dynamic_bitset<> &bitset) |
| virtual void | setDigitalOutput (const ::boost::dynamic_bitset<> &bitset, const ::boost::dynamic_bitset<> &bitmask) |
| Public Member Functions inherited from rl::hal::JointAccelerationActuator | |
| JointAccelerationActuator (const ::std::size_t &dof) | |
| virtual | ~JointAccelerationActuator () |
| Public Member Functions inherited from rl::hal::JointCurrentSensor | |
| JointCurrentSensor (const ::std::size_t &dof) | |
| virtual | ~JointCurrentSensor () |
| Public Member Functions inherited from rl::hal::JointPositionActuator | |
| JointPositionActuator (const ::std::size_t &dof) | |
| virtual | ~JointPositionActuator () |
| Public Member Functions inherited from rl::hal::JointPositionSensor | |
| JointPositionSensor (const ::std::size_t &dof) | |
| virtual | ~JointPositionSensor () |
| Public Member Functions inherited from rl::hal::JointVelocityActuator | |
| JointVelocityActuator (const ::std::size_t &dof) | |
| virtual | ~JointVelocityActuator () |
| Public Member Functions inherited from rl::hal::JointVelocitySensor | |
| JointVelocitySensor (const ::std::size_t &dof) | |
| virtual | ~JointVelocitySensor () |
Private Types | |
| enum | Command { COMMAND_CONTROL_PACKAGE_PAUSE = 80, COMMAND_CONTROL_PACKAGE_SETUP_INPUTS = 73, COMMAND_CONTROL_PACKAGE_SETUP_OUTPUTS = 79, COMMAND_CONTROL_PACKAGE_START = 83, COMMAND_DATA_PACKAGE = 85, COMMAND_GET_URCONTROL_VERSION = 118, COMMAND_REQUEST_PROTOCOL_VERSION = 86, COMMAND_TEXT_MESSAGE = 77 } |
Private Member Functions | |
| void | recv () |
| void | send (::std::uint8_t *buffer, const ::std::size_t &size) |
| void | send (const ::std::uint8_t &command) |
| void | send (const ::std::uint8_t &command, const ::std::vector< ::std::string > &strings) |
| void | send (const ::std::uint8_t &command, const ::std::uint16_t &word) |
| void | sendAnalogOutputs () |
| void | sendBitRegisters () |
| void | sendDigitalOutputs () |
| void | sendDoubleRegister () |
| void | sendIntegerRegister () |
| template<typename T > | |
| void | serialize (T &t, ::std::uint8_t *&ptr) |
| template<typename T , ::std::size_t N> | |
| void | serialize (T(&t)[N], ::std::uint8_t *&ptr) |
| template<typename T > | |
| void | unserialize (::std::uint8_t *&ptr, T &t) |
| template<typename T , ::std::size_t N> | |
| void | unserialize (::std::uint8_t *&ptr, T(&t)[N]) |
Private Attributes | |
| Input | input |
| Output | output |
| Socket | socket2 |
| Socket | socket4 |
| Version | version |
Additional Inherited Members | |
| Protected Member Functions inherited from rl::hal::Device | |
| void | setConnected (const bool &connected) |
| void | setRunning (const bool &running) |
Universal Robots RTDE interface (3.3).
|
private |
| rl::hal::UniversalRobotsRtde::UniversalRobotsRtde | ( | const ::std::string & | address | ) |
|
virtual |
|
virtual |
Implements rl::hal::Device.
| void rl::hal::UniversalRobotsRtde::doScript | ( | const ::std::string & | script | ) |
| std::vector<::rl::math::Real > rl::hal::AnalogInputReader::getAnalogInput |
|
virtual |
Implements rl::hal::AnalogInputReader.
| virtual ::rl::math::Real rl::hal::AnalogInputReader::getAnalogInput |
|
virtual |
Implements rl::hal::AnalogInput.
|
virtual |
Implements rl::hal::AnalogInput.
|
virtual |
Implements rl::hal::AnalogInput.
| std::vector<::rl::math::Unit > rl::hal::UniversalRobotsRtde::getAnalogInputUnit | ( | ) | const |
| rl::math::Unit rl::hal::UniversalRobotsRtde::getAnalogInputUnit | ( | const ::std::size_t & | i | ) | const |
| std::vector<::rl::math::Real > rl::hal::AnalogOutputReader::getAnalogOutput |
|
virtual |
Implements rl::hal::AnalogOutputReader.
| virtual ::rl::math::Real rl::hal::AnalogOutputReader::getAnalogOutput |
|
virtual |
Implements rl::hal::AnalogOutput.
|
virtual |
Implements rl::hal::AnalogOutput.
|
virtual |
Implements rl::hal::AnalogOutput.
| std::vector<::rl::math::Unit > rl::hal::UniversalRobotsRtde::getAnalogOutputUnit | ( | ) | const |
| rl::math::Unit rl::hal::UniversalRobotsRtde::getAnalogOutputUnit | ( | const ::std::size_t & | i | ) | const |
|
virtual |
Implements rl::hal::CartesianForceSensor.
|
virtual |
Implements rl::hal::CartesianPositionSensor.
| rl::math::Transform rl::hal::UniversalRobotsRtde::getCartesianPositionTarget | ( | ) | const |
|
virtual |
Implements rl::hal::CartesianVelocitySensor.
| rl::math::MotionVector rl::hal::UniversalRobotsRtde::getCartesianVelocityTarget | ( | ) | const |
|
virtual |
Implements rl::hal::DigitalInputReader.
|
virtual |
Implements rl::hal::DigitalInputReader.
|
virtual |
Implements rl::hal::DigitalInput.
|
virtual |
Implements rl::hal::DigitalOutputReader.
|
virtual |
Implements rl::hal::DigitalOutputReader.
|
virtual |
Implements rl::hal::DigitalOutput.
|
virtual |
Implements rl::hal::JointCurrentSensor.
| std::int32_t rl::hal::UniversalRobotsRtde::getJointMode | ( | const ::std::size_t & | i | ) | const |
|
virtual |
Implements rl::hal::JointPositionSensor.
| rl::math::Vector rl::hal::UniversalRobotsRtde::getJointTemperature | ( | ) | const |
|
virtual |
Implements rl::hal::JointVelocitySensor.
| UniversalRobotsRtde::RobotMode rl::hal::UniversalRobotsRtde::getRobotMode | ( | ) | const |
| std::uint32_t rl::hal::UniversalRobotsRtde::getRobotStatusBits | ( | ) | const |
| UniversalRobotsRtde::RuntimeState rl::hal::UniversalRobotsRtde::getRuntimeState | ( | ) | const |
| UniversalRobotsRtde::SafetyMode rl::hal::UniversalRobotsRtde::getSafetyMode | ( | ) | const |
| std::uint32_t rl::hal::UniversalRobotsRtde::getSafetyStatusBits | ( | ) | const |
|
virtual |
Implements rl::hal::Device.
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
inlineprivate |
|
inlineprivate |
|
virtual |
Implements rl::hal::AnalogOutputWriter.
| virtual void rl::hal::AnalogOutputWriter::setAnalogOutput |
| void rl::hal::AnalogOutputWriter::setAnalogOutput |
| void rl::hal::UniversalRobotsRtde::setAnalogOutputUnit | ( | const ::std::size_t & | i, |
| const ::rl::math::Unit & | value | ||
| ) |
| void rl::hal::UniversalRobotsRtde::setAnalogOutputUnit | ( | const ::std::vector< ::rl::math::Unit > & | values | ) |
| void rl::hal::DigitalOutputWriter::setDigitalOutput |
| void rl::hal::DigitalOutputWriter::setDigitalOutput |
|
virtual |
Implements rl::hal::DigitalOutputWriter.
| virtual void rl::hal::DigitalOutputWriter::setDigitalOutput |
|
virtual |
Implements rl::hal::JointAccelerationActuator.
|
virtual |
Implements rl::hal::JointPositionActuator.
|
virtual |
Implements rl::hal::JointVelocityActuator.
|
virtual |
Implements rl::hal::Device.
|
virtual |
Implements rl::hal::CyclicDevice.
|
virtual |
Implements rl::hal::Device.
|
inlineprivate |
|
inlineprivate |
|
private |
|
private |
|
private |
|
private |
|
private |